the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 30 Apr 2024
| 30 Apr 2024
On the sensitivity of sea ice deformation statistics to plastic damage
Antoine Savard
Bruno Tremblay
We implement a plastic damage parametrization, distinct from the elastic damage in the elasto-brittle framework, in the standard viscous–plastic (VP) sea ice model to disentangle its effect from resolved model physics (visco-plastic with and without damage) on its ability to reproduce observed scaling laws of deformation. To this end, we compare scaling properties and multifractality of simulated divergence and shear strain rate, as proposed in the Sea Ice Rheology Experiment (SIREx) studies, with those derived from the RADARSAT Geophysical Processor System (RGPS). Results show that including a plastic damage parametrization in the standard viscous–plastic model increases the spatial but decreases the temporal localization of simulated linear kinematic features (LKFs) and brings all spatial deformation rate statistics in line with observations from RGPS without the need to increase the mechanical shear strength of sea ice as recently proposed for lower-resolution viscous–plastic sea ice models. In fact, including damage with a healing timescale of th=30 d and an increased mechanical strength unveils multifractal behavior that does not fit the theory. Therefore, a plastic damage parametrization is a powerful tuning knob affecting the deformation statistics of viscous–plastic sea ice.
- Article
(6799 KB) - Full-text XML
- BibTeX
- EndNote





It is reasonable to assume that ice could be a material simple enough to describe. After all, it is just frozen water. However, this apparent simplicity hides tremendous atomic, chemical, and mechanical complexities. Northern communities succeeded in capturing the spirit of this complexity in their language. The fact that they have rich and precise words for countless variations of ice and snow types reveals a profound implicit understanding of the importance of the symbiotic relation between daily activities and ice identification via both its visual features and its formation (Krupnik, 2010). Ice color, for example, marks the melting zones of sea ice in spring and allows for the identification of hazardous sea ice for walking. Regardless of the beauty and intelligence of this process, other more quantitative metrics are used for problems covering a larger range of scales (from the kilometer scale to thousands of kilometers), including short-term forecast and decadal projections for navigation and global climate applications.
Sea ice moves under the action of winds and ocean currents, leading to collisions between floes. Internal stresses rapidly redistribute these forces from ice–ice interactions over long distances. Sea ice deformations occur along well-defined lines of deformation called linear kinematic features (LKFs; Kwok, 2001) that are scale-independent and multifractal, ranging from the smallest floes (meters) to the size of the Arctic Basin, with their width ranging from 0 m to 10 km (Hoffman et al., 2019). Along these lines, sea ice floes can slide along one another (shear), ridge (convergence), or move apart creating leads (divergence). These mechanical processes affect both the lead patterns and the local and pan-Arctic state of the atmosphere–ice–ocean system – notably the sea ice mass balance, salt fluxes in the upper ocean via brine rejection, and vertical heat and moisture fluxes between the ocean and the atmosphere (Aagaard et al., 1981; McPhee et al., 2005). These physical processes must be adequately represented in both global climate models and ice–ocean prediction systems through either added physics or parametrizations. The ability of a sea ice model to reproduce linear kinematic features can be determined by looking at the length; angle between conjugate pairs of LKFs; lifetime; and statistical spatiotemporal properties such as scaling, multifractality, and coupling. As such, their multifractality and scaling properties are important to capture in a sea ice model for all applications.
Statistical properties derived from synthetic aperture radar (SAR) imagery of Arctic sea ice show that LKFs exhibit complex laws, including spatiotemporal scaling (e.g., Marsan et al., 2004; Rampal et al., 2008; Marsan and Weiss, 2010). As discussed in Weiss (2013), the scaling properties of sea ice, contrary to those of turbulence in fluid, have been shown to be coupled in space and time in such a way that the value of one is influenced by the sampling resolution of the other and also by its space–time localization. These statistical characteristics are theorized to result from brittle compressive shear faults (Schulson, 2004) and a cascade of fracture that redistributes stresses within the pack ice (e.g., Marsan and Weiss, 2010; Dansereau et al., 2016). The complexity of these interactions is undeniable, and a desirable sea ice model for the Arctic system should represent LKFs adequately.
Dynamical sea ice models use a diverse range of rheologies to simulate sea ice motion and deformation. A rheology describes the relationship between internal stress and deformation (rate) for a given material. In the standard viscous–plastic (VP) rheology – with an elliptical yield curve and normal flow rule (e.g., Hibler, 1979, and its variants) – sea ice is considered a highly viscous fluid for small deformations. In this case, sea ice slowly deforms by creeping. It is a time-dependent process in which strain accumulates due to long-term stresses. When a critical threshold in shear, compression, and tension, defined by the yield curve, is reached, the ice fractures and enters a plastic regime (larger, permanent, rate-independent deformation). The main advantage of using a viscous–plastic model over a more physical elastic–plastic (EP) model (e.g., Coon et al., 1974) is that the material has no “memory” of past deformations and it is not necessary to keep track of previous strain states, rendering the VP formulation mathematically and numerically simpler. Since the first formulation of the VP model, much work has been done to improve the efficiency of the numerical solver used to solve the highly non-linear momentum equations (Hunke and Dukowicz, 1997; Hunke, 2001; Lemieux et al., 2008; Lemieux and Tremblay, 2009; Lemieux et al., 2010; Bouillon et al., 2013).
Following a reassessment of basic (incorrect) assumptions behind models developed from the Arctic Ice Dynamics Joint EXperiment (AIDJEX) (sea ice is isotropic and has no tensile strength; Coon et al., 1974, 2007), new rheologies were proposed to mend some of these problems. For instance, ice would be better described with discontinuities that are accounted for in the representation of deformation and an anisotropic yield curve that allows for tensile stresses (Coon et al., 2007). Models that incorporate some of these recommendations include the elasto-brittle (EB; Girard et al., 2011) model and modifications thereof (MEB and BBM; Dansereau et al., 2016; Olason et al., 2022) originally cast using a finite-element numerical scheme (FEM), in which elastic deformations are followed by brittle failure, while larger deformations along fault lines are viscous. These models include an elastic damage parametrization that accounts for the fact that damage associated with (prior) fractures, in addition to ice thickness and concentration, also affects the elastic modulus of the ice (see, for example, Girard et al., 2011; Rampal et al., 2016; Dansereau et al., 2016; Olason et al., 2022). These authors argued that the inclusion of a damage parametrization was a key factor for the proper simulation of sea ice deformations that follow observed spatial and temporal scaling properties (see also Dansereau et al., 2016). In other models (e.g., elastic–anisotropic–plastic, EAP; Tsamados et al., 2013; Wilchinsky and Feltham, 2006), the fracture angle between conjugate pairs of LKFs is specified, leading to anisotropy between interacting diamond-shaped floes. Another approach includes the elastic–decohesive rheology using a material point method (Schreyer et al., 2006; Sulsky and Peterson, 2011), in which the lead mechanics are simulated through decohesion.
Damage parametrizations – first developed in rock mechanics – are ad hoc in that they are derived from observations and not from first physics principles. For instance, a damage parameter can be quantitatively expressed as a scalar relationship between the elastic modulus of a material before and after fracture (Amitrano et al., 1999). In this model, the ice strength does not decrease when damage is present; instead, it is Young's modulus that decreases, resulting in larger deformations for the same stress state. This was put to advantage in the EB model family where the damage is expressed as a function of the (time-step-dependent) stress overshoot in principal stress space referenced to a yield criterion (Rampal et al., 2016; Plante et al., 2020). Another approach used in rock mechanics first considers mode I (tensile) failure on the plane where the maximum tensile stress occurs, followed by crack propagation along the plane where the mode II (shear) stress intensity factor is maximized (Isaksson and Ståhle, 2002a, b). Other, more complex descriptions of damage parametrizations (in both its definition and evolution) – such as fracture initiation around elliptical flaws (e.g., Hoek, 1968) – have been used in rock mechanics and could in principle be implemented in sea ice models.
In the context of sea ice and plasticity theory, plastic damage (hereafter referred to as damage for simplicity) can be accomplished by including strain weakening in the model that is independent of subsequent divergence and reduction in ice thickness and/or concentration; see, for example, Lubliner et al. (1989) for a simple model of plastic degradation. In recent years, more complex models have been developed that include (elastic–)plastic damage, notably in concrete, in which plasticity is taken into account in the damage variables, resulting in changes in the yield curve (see, for instance, Luccioni et al., 1996; Jason et al., 2006; Voyiadjis et al., 2008; Hafezolghorani et al., 2017; Parisio and Laloui, 2017; Friedlein et al., 2023).
Earlier model–observation comparison studies, aimed at defining the most appropriate rheology for sea ice, found that any rheological model that includes compressive and shear strength reproduces observed sea ice drift, thickness, and concentration equally well (e.g., Flato and Hibler, 1992; Kreyscher et al., 2000; Ungermann et al., 2017). The modeling community subsequently used deformation statistics (probability density function, spatiotemporal scaling, and multifractality) to discriminate between different sea ice rheological models (Rampal et al., 2019; Bouchat et al., 2022). Results from the community-driven Sea Ice Rheology Experiment (SIREx), under the auspices of the Forum for Arctic Modeling and Observational Synthesis (FAMOS), showed that any model with a sharp transition from low (elastic or viscous creep) deformations to large (plastic or viscous) deformations can reproduce the new deformation-based metrics, provided the models are run at sufficiently high resolutions – 2 km for finite difference models (FDMs) and 10 km for FEMs (Bouchat et al., 2022). A last unsuccessful attempt at discriminating between rheological models includes the analysis of the LKF density and angles of fracture between conjugate pairs of LKFs; to this point, all rheologies overestimate the angles of fracture and all reproduce densities of LKFs comparable to observations provided a small enough resolution is used – 2 km for FDMs and 10 km for FEMs (Hutter et al., 2021).
Ultimately, the best way to compare models is to switch one single aspect on and off in the same modeling framework. An important step towards this goal was the implementation of the MEB rheology in finite difference, allowing for a direct comparison between VP and MEB rheologies in the same numerical framework (Plante et al., 2020). Other significant differences between the VP and MEB models include the sub-grid-scale damage parametrization and the consideration of elastic deformations prior to and subsequent to fracture allowing the material to retain a memory of past deformations. In an attempt to further disentangle the effect of elasticity, damage, and discretization, we include a plastic damage parametrization in the standard VP model and analyze the deformation statistics of this modified VP model following recommendations from SIREx (Bouchat et al., 2022), and Olason et al. (2022). To this end, we compare the simulated (with and without damage in the VP model) and the RADARSAT-derived Eulerian deformation products using probability density functions (PDFs), spatiotemporal scaling laws, and multifractality.
The paper is organized as follows. First, we describe the model in Sect. 2. Then we introduce a damage parametrization that can be used in the context of a viscous–plastic model. The sea ice deformation data and deformation metrics used to evaluate the model's performance are described in Sects. 3 and 4. Results and discussion of the results are presented in Sects. 5 and 6. Finally, concluding remarks and directions for future work are summarized in Sect. 7.
2.1 Governing equations
The two-dimensional equation governing the temporal evolution of sea ice motion is given by
where m (=ρih) is the sea ice mass per unit area, ρi is the ice density, h is the mean ice thickness, u is the horizontal ice velocity vector , is a unit vector perpendicular to the sea ice plane, f is the Coriolis parameter, τa is the surface wind stress, τw is the water drag, g is the gravitational acceleration, Hd is the sea surface dynamic height, and σ is the vertically integrated internal ice stress tensor. In the following, the advection term is neglected because it is orders of magnitude smaller than the other terms at a 10 km spatial resolution (Zhang and Hibler, 1997). The surface air stress and water drag are parametrized as quadratic functions of the ice velocities with a constant turning angle (θa,θw) for the atmosphere and the ocean (e.g., McPhee, 1975, 1986; Brown, 1979):
where ρa and ρw are the air and water densities, and are the geostrophic winds and ocean currents, and Ca and Cw are the air and water drag coefficients. The reader is referred to Tremblay and Mysak (1997) and Lemieux et al. (2008, 2010) for more details on the model and the numerical solver.
The constitutive law for the standard viscous–plastic rheology with an elliptical yield curve and associated (normal) flow rule can be written as (Hibler, 1977, 1979)
where is a replacement pressure term and ζ and η are the non-linear bulk and shear viscosities defined as
The sea ice pressure P is parametrized as
where P* ( N m−1) is the ice strength parameter; A is the sea ice concentration; and C (=20) is the ice concentration parameter, an empirical constant characterizing the dependence of the compressive strength on sea ice concentration (Hibler, 1979). For small strain rates (Δ⟶0), the viscosities tend to infinity, and the bulk and shear viscosities, ζ and η, are capped to a maximum value using a continuous version of the classical replacement scheme (Hibler, 1979; Lemieux and Tremblay, 2009):
where (Hibler, 1979), equivalent to a minimum value of s−1 (Kreyscher et al., 1997). In the limit where Δ⟶∞ (x⟶0), tanh x≈x, and Eq. (9) reduces to (Eq. 5). In the limit where Δ⟶0 (x⟶∞), tanh x⟶1, and ζ=ζmax. The replacement pressure Pr is given by
which ensures a smooth transition between the viscous and plastic regimes and stress states that lie on ellipses that all pass through the origin.
2.2 Damage parametrization
2.2.1 Background
Progressive damage models were initially developed to model the non-linear brittle behavior of rocks (Cowie et al., 1993; Tang, 1997; Amitrano and Helmstetter, 2006). Since then, many studies have integrated some damage mechanism in which the mechanical ice properties (e.g., elastic stiffness, E; viscosity, η; and relaxation time, λ) are written in terms of a scalar, non-dimensional parameter d that represents the sub-grid-scale damage of the ice (Girard et al., 2011; Dansereau et al., 2016; Rampal et al., 2016; Plante et al., 2020). For example, Dansereau et al. (2016) proposed the following parametrization of the elastic stiffness (E) and the viscosity (η) akin to the ice pressure in Hibler (1979):
where E0 and η0 are (constant) Young's modulus and viscosity of undeformed ice and α (>1) is a parameter that controls the rate at which the viscosity decreases and the ice loses its elastic properties. In this formulation, E and η depend on their undamaged value (E0 and η0), sea ice thickness and concentration (A and h), and time-dependent damage (d(t)).
In progressive damage parametrization, damage builds as a function of the stress overshoot beyond the yield curve. Following Plante (2021), the scaling factor Ψ () required to bring a super-critical stress (σ′) state back on the yield curve (σf) is written as
where σf is the corrected stress. The corrected state of stress is defined as the intersection point of the line joining and the failure envelope of the Mohr–Coulomb criterion along any stress correction path. Note that the stress correction path is not a flow rule; it does not change the visco-elastic constitutive equation of the MEB model. Its purpose is to convert the excess stress into damage (d). This definition of damage assumes that only stresses change post-fracture and the strain (rate) does not. The evolution equation for the damage parameter can be written as (Dansereau et al., 2016; Plante et al., 2020)
where td ( =𝒪(1) s) and th ( =𝒪(105) s) are the damage and healing timescales and the condition Δt≪λ must be met for stability reasons (Dansereau et al., 2016). Consequently, the damage at any given time is a function of the previously accumulated damage. This constitutes the memory of the previous stress state in the MEB model.
2.2.2 New VP model damage parametrization
Since the VP model does not include the elastic regime of sea ice deformations, we propose a parametrization of damage that modifies the size of the yield curve and therefore the shear and bulk viscosities.
In the standard VP model, the ice strength P depends only on the ice concentration A and the ice mean thickness h. Sea ice, therefore, weakens along an LKF only when sea ice divergence is present – affecting the ice strength through the exponential dependence on the sea ice concentration (Eq. 8) – contrary to real sea ice that weakens when a fracture is present irrespective of whether post-fracture divergence or convergence is present.
Building on Plante (2021), we include damage in the VP model using a simple advection equation with source and sink terms (akin to what is used in the MEB formulation) of the form
which asymptotes to the steady-state solution in the absence of advection and healing and exponentially decays to zero when only healing is considered. In the plastic regime, when ζ≈0, and damage increases asymptotically to a maximum value of 1. In the viscous regime, when ζ≈ζmax, and damage asymptotes to zero with the timescale th. Note also that the healing term in Eq. (16) depends on the level of damage. We choose control values of td (=1 d) and th (= 30 d) as typical timescales for fracture propagation and healing (see Dansereau et al., 2016, and Murdza et al., 2022, for small-healing-timescale explanations). The damage timescale used in the model simulations is in line with passive microwave satellite imagery that shows lead propagation over hundreds to a thousand kilometers over a 1 d timescale, while a large healing timescale comes from the thermodynamic growth of a characteristic ice thickness of 1 m of ice. Note that a VP model is a nearly ideal plastic material and can be considered an elastic–plastic material with an infinite elastic wave speed; therefore, the fracture propagation is instantaneous (i.e., it is resolved with the outer-loop solver of an implicit solver or by the sub-cycling of an elastic–viscous–plastic, EVP, model). In the above equation, n is a free parameter setting the steady-state damage for a given deformation state. Using Eq. (9) and the fact that , Eq. (16) can be written as
Following Dansereau et al. (2016) and Rampal et al. (2016), the coupling between the ice strength and the damage is written as
where P varies linearly with d and where d incorporates the full non-linearity of the viscous coefficients (ζ). We refer to this model as VPd in the following.
2.3 Forcing, domain, and numerical scheme
The model is forced with 6-hourly geostrophic winds calculated using sea level pressure (SLP) from the National Centers for Environmental Prediction/National Center for Atmospheric Research (NCEP/NCAR) reanalysis (Kalnay et al., 1996). First, SLPs are interpolated at the tracer point on the model C grid using bicubic interpolation (Akima, 1996). The field is then smoothed using a Gaussian filter with σ=3, and the geostrophic winds are computed from the smoothed field, yielding winds on the model's B grid. The winds are interpolated linearly in time to get the wind forcing at each time step. The model is coupled thermodynamically with a slab ocean. The climatological ocean currents were obtained from the steady-state solution of the Navier–Stokes equation with a quadratic drag law, without momentum advection, assuming a two-dimensional, non-divergent velocity field and forced with a 30-year climatological wind stress field. Monthly climatological ocean temperatures are specified at the model's open boundaries from the Polar science center Hydrographic Climatology (PHC 3.0) (Steele et al., 2001). The reader is referred to Tremblay and Mysak (1997) for more details.
The equations are solved on a Cartesian plane (polar stereographic projection) with a regular 10 km grid. The equations are discretized on an Arakawa-C grid and solved at each time step (Δt=1 h) using the Jacobian-free Newton–Krylov (JFNK) method (Lemieux et al., 2010). At each Newton loop (NL) of the solver, the linearized set of equations is solved using a line successive over-relaxation (LSOR) preconditioner and the generalized minimum residual (GMRES) method (Lemieux et al., 2008) with a relaxation parameter ωlsor=1.3. The non-linear shear and bulk viscosity coefficients and the water drag are then updated, and the process is repeated using an inexact Newton's method until either the total residual norm of the solution reaches a user-defined value () or the maximum number of Newton loops is reached (NLmax=200) (Lemieux et al., 2010).
Following Bouchat and Tremblay (2017), the model is first spun up (with damage turned off), with a set of 10 random years between 1970 and 1990, a constant 1 m ice thickness, and 100 % concentration as initial conditions. The shuffling of the spin-up years is used to prevent biases associated with low-frequency variability, such as the Arctic oscillations or Arctic Ocean oscillations, which would lead to a larger difference in the initial ice thickness field (Thompson and Wallace, 1998; Rigor et al., 2002; Proshutinsky and Johnson, 2011). From the spun-up state, each simulation is run from 1 to 31 January 2002. The deformation statistics presented below are robust to the exact choice of winter discontinuities at the end of each year (Bouchat and Tremblay, 2017).
Both the control and simulation with damage use the same initial conditions. In order to test the sensitivity of the results to the choice of initial conditions, the model was spun up for 1 additional year including the damage parametrization (recall that the healing timescale is 30 d) and the simulations were repeated. The results presented below are also robust to the exact choice of initial conditions.
We use the 3 d gridded sea ice deformations from the Sea Ice MEaSUREs data set, formerly called the RADARSAT Geophysical Processor System (and referred to as RGPS in the following for simplicity) (Kwok et al., 1998; Kwok, 1997). The RGPS data set is obtained from Lagrangian ice velocity fields by tracking the corners of initially uniform grid cells on consecutive synthetic aperture radar (SAR) images. The deformation of the grid cells is used to approximate the velocity derivatives and the strain rate invariants, εI and εII, using line integrals (Kwok et al., 1998). The initial Lagrangian grid spatial resolution is 10 km × 10 km, except in a 100 km band along the coasts, where a coarser resolution of 25 km is used. Finally, the data are regridded onto a 12.5 km × 12.5 km fixed polar stereographic projection using a 3 d temporal resolution. The 3 d gridded data set is available from 1997 to 2008 for summer and winter (November to July) on the Alaska Satellite Facility (ASF) Distributed Active Archive Center (DAAC) website (https://asf.alaska.edu/, last access: 23 April 2024). Following Bouchat and Tremblay (2017), we only use strain rates larger than d−1 – equal to the tracking error of about 100 m on the vertices of the Lagrangian grid cells (Lindsay and Stern, 2003).
Following Bouchat and Tremblay (2017), Hutter et al. (2018), Girard et al. (2009), and Marsan et al. (2004), we compare the probability density functions, spatiotemporal scaling laws of the mean deformation rates, and multifractal properties simulated by the model with the RGPS data (see Sect. 4.1 to 4.4 below for details). We calculate the total deformation using simulated 3 d average sea ice velocities inside the SAR sea ice RGPS data in the region where an 80 % temporal data coverage is present for the winters 1997–2008 – referred to as RGPS80 in the following (see Fig. 1 or Bouchat and Tremblay, 2017). The simulated sea ice deformations are compared with observed sea ice deformations derived from 3 d average RGPS ice velocities for January 2002.

Figure 1Hotness map of temporal presence in the RGPS observations for January 2002. The black line represents the RGPS80 mask and is drawn at the 80 % temporal frequency contour. This mask is used for all results.
4.1 Simulated deformation fields
Following Marsan et al. (2004) and Bouchat and Tremblay (2017), the total sea ice deformation rates are calculated from the (hourly) divergence () and the maximum shear strain rate () as
where
The sea ice velocities are first averaged over a period of 3 d in order to match the temporal resolution of the RADARSAT observations. The averaged velocity fields are then used to calculate the strain rate invariants at the center of each grid cell. These values represent averaged Eulerian deformation rates over the grid cell area.
4.2 Probability density functions (PDFs)
Probability density functions are used to assess the ability of the models to reproduce large deformation rates and to determine their statistical distribution. We separate the domain into logarithmically increasing bins and perform a least-squares power-law fit on the tail of the log–log distributions where the interval for a given model consists of all bins up to an order of magnitude from the largest deformation bin available. Therefore, intervals between runs differ, but each interval is the most representative of the deformation decay for a given model (Bouchat et al., 2022). To quantify the difference between the shape of the simulated and observed PDFs, we use the Kolmogorov–Smirnov (KS) distance D, defined as the absolute difference between the cumulative density functions (CDFs) of the models and the data :
In this approach, the shape of the PDF is taken into account directly and there is no need to a priori assume the underlying statistical distribution of the PDF. The interpretation of the KS distance is straightforward: a smaller D implies a closer agreement between observed and simulated statistical distributions.
As noted in Bouchat and Tremblay (2020) and Bouchat et al. (2022), a linear decay in deformations does not imply a power law, as other distributions (e.g., log-normal distributions) can also approximately decay linearly (Clauset et al., 2009). Therefore, we do not assume that the power-law exponents derived from the CDFs are representative of the true distributions; we instead use them as a means to differentiate between simulated and observed PDFs of deformation rates. We therefore use the average of the absolute difference in the logarithms of the simulated and observed PDFs (see also Bouchat et al., 2022). This metric has the advantage of giving more weight to the tail of the PDFs (small probabilities and large deformation rates). Finally, we present results of negative and positive divergence separately to avoid error cancellation (Bouchat et al., 2022).
4.3 Spatiotemporal scaling analysis
Following Marsan et al. (2004), we use the following coarsening algorithm to compute the spatiotemporal scaling exponent of the mean deformation rates derived from models and RGPS observations to estimate the scaling exponents:
where L and T are the spatial and temporal scales at which sea ice total deformation rates are averaged and β and α are the spatial and temporal scaling exponents. As pointed out by Weiss (2017), β can take values between 0 (homogeneous deformations) and 2 (deformations concentrated in a single point), while α can take values between 0 (random deformation events) and 1 (one single extreme event).
We find β by first averaging the simulated velocity fields to match the 3 d temporal aggregate of RGPS. We then compute the mean ice velocities in boxes of varying sizes L from that of the models' spatial resolution (10 km) to the full domain size with doubling steps – L=10, 20, 40, 80, 160, 320, 640 km. The same procedure is repeated with the RGPS data set starting from a 12.5 km resolution. At each step, the boxes of length L overlap with their neighbors at their midpoint. The RGPS80 mask does not necessarily contain a whole number of boxes, in general, where n is the maximal size of the mask along a given axis and L0 is the resolution of one grid cell. The mean inside the fractions of squares that are left at the boundaries of the domain is included only for boxes that are filled with at least 50 % data. We calculate the deformation rates using the average of time and space velocities, and we also compute the effective size of the box by taking the square root of the total number of occupied cells in the box. From these points, we take the mean of the deformation rates for each box size and fit a least-squares power law in the log–log space to find β, the spatial scaling exponent.
For the temporal scaling exponent α, we instead fix L to the spatial resolution value of the data set (10 km), and we compute the mean deformations with the different time-averaged velocities ranging from 3 to 24 d (i.e., T=3, 6, 12, 24) and fit a least-squares power law to calculate the temporal scaling exponent α.
4.4 Multifractal analysis
The scaling exponents (β and α) are functions of the moment q of the deformation rate distribution:
While it is usually assumed that the structure functions β(q) and α(q) are quadratic in q for the sea ice total deformation rates (Marsan et al., 2004; Bouillon and Rampal, 2015; Rampal et al., 2019), the structure functions are not necessarily quadratic in q for the generalized multifractal formalism (see Schmitt et al., 1995; Lovejoy and Schertzer, 2007; Weiss, 2008; Bouchat and Tremblay, 2017) and are expressed instead as (for the spatial structure function)
where
In the above equation, C1 () characterizes the sparseness of the field, ν (, ν≠1) is the Lévy index or the degree of multifractality (0 for a mono-fractal process, 2 for a log-normal model with a maximal degree of multifractality), and H () is the Hurst exponent. We use a general non-linear least-squares fit for the structure functions' parameters. A similar equation holds for the temporal structure function α(q). K(q) is called the “moment scaling function exponent” for a random variable. It defines the singularity spectrum, a function that describes the distribution of singularities (or points of non-smoothness) across different scales in the system.
Note that the scaling exponents for q=1 (β(1) and α(1)) are equal to 1−H, and, therefore, a higher H means a less localized or smoother field. Moreover, the degree of multifractality ν defines how fast the fractality increases with larger singularities. As ν increases, larger deformations will dominate, and there will be fewer low-value smooth regions for example. C1 represents how “far” the multifractal process is from the mean singularity value given by ; we can understand this by taking the derivative : the higher C1 is compared with 1−H, the fewer field values will correspond to any given singularity; i.e., the singular field values are more sparsely grouped (Lovejoy and Schertzer, 2007).
As noted in Bouchat et al. (2022), the computed parameter values are sensitive to the number of points used to define the structure functions. Therefore, we use the same moment increments of 0.1 in order to derive the three multifractal parameters (ν, C1, and H).
5.1 Simulated total deformation field
In the control run (d=0, or n=∞), the simulated LKFs are more diffuse and less intense, and the LKF density is lower when compared with RGPS observations (see Fig. 2b). When including damage, LKFs are better-defined and more intense, and the LKF density is higher and in better qualitative agreement with observations (this is true for all configurations of VPd models except n=1); the ice strength along LKFs is much weaker, providing a strong positive feedback for the simulation of higher intensity and density of fracture lines, akin to RGPS-derived LKFs (see Fig. 2). As n decreases from n=50 (∼ infinity) to n=1, the intensity, definition, and density of the LKF increase until maximum damage is present in all grid cells and LKFs are no longer distinguishable from the undeformed ice, effectively rendering the ice fluid-like (Fig. 2d). These results are robust to the exact choice of a healing timescale (th=2–30 d), except when th≈td when fewer extreme deformation events are present. In this case, the damage increment over partly damaged cells is compensated for by the healing term. In all cases, however, the simulated LKFs are not as well-defined as the LKFs in RGPS observations, presumably due to spatial resolution (see for instance Bouchat et al., 2022). Note that increasing shear strength (e=0.7) with damage does improve the localization of LKFs as in the simulation without damage with e=0.7 in accordance with results from Bouchat and Tremblay (2017) (see Fig. 2i). Another key visual difference is that the spatial mean of the deformation rates is higher for the VPd model than for the VP model and RGPS data; see also Sect. 5.2 below for a discussion and more quantitative assessment.
The mean ice thickness over the Arctic Ocean is also sensitive to the amount of damage in the model (results not shown). For instance, the VPd model with n=5 and th=2 (low damage) and n=3 and th=30 (high damage) gives a 1 and 5 cm mean ice thickness anomaly, respectively. This thickness increase occurs mostly along LKFs in the form of ridges and clearly shows the impact of damage on the deformation fields. Moreover, we see a reduction in sea ice thickness anomalies for the VPd model with maximal damage (n=1 and th=30). In this case, convergence (thickening) occurs over broader areas and, when integrated, leads to a reduction in the positive ice thickness anomaly.
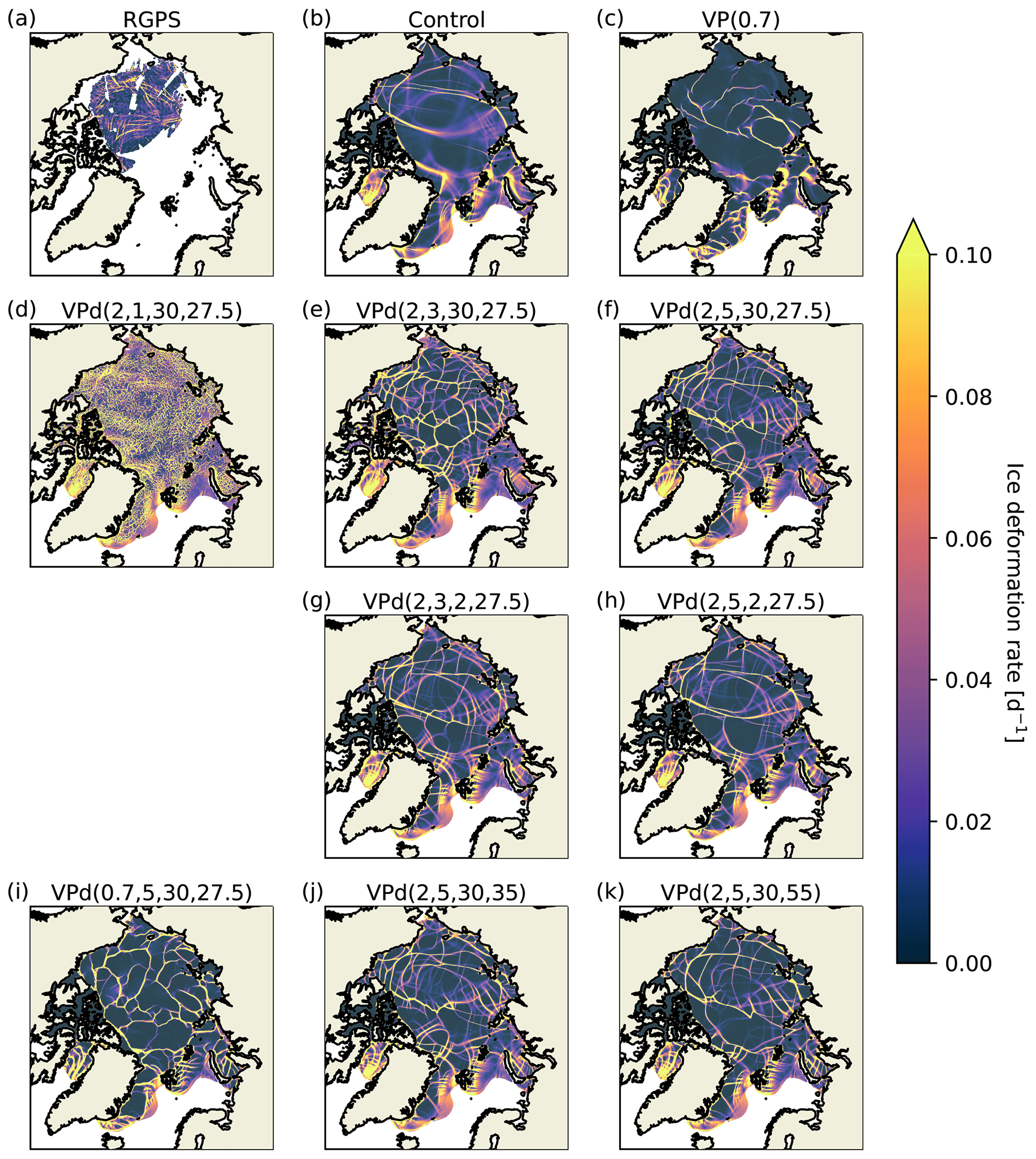
Figure 2Simulated (VPd()) and observed total deformation rates at a 10 km resolution (12.5 km for observations) for a 3 d average between 29–31 January 2002 compared with observations as a function of the ellipse aspect ratio (e), damage exponent (n), healing timescale (th, d), and compressive strength (P*, kN m−2). The VPs with e=2 (control) and e=0.7 (VP(0.7)) are equivalent to VPd() and VPd(), respectively.
5.2 Probability density functions (PDFs)
When considering damage, a larger number of LKFs is present for any mean total strain rate with a transfer from lower to larger total deformation rates in the PDF. This shift results in a log-linear decay in the tail of the PDFs for shear rate and divergence/convergence that is in better agreement with RGPS. The VPd model is particularly good at reproducing the large divergence and convergence rate (and to a lesser extent the large shear strain rate) present in RGPS observations contrary to the standard VP model that has a limited ability to simulate both observed divergence and convergence rates larger than 10−1 d−1 (see Fig. 3). The PDFs of shear strain rates are more sensitive to the healing timescale, th, than the damage exponent parameter, n, with larger healing timescales leading to more shear. The best fit with observations occurs for and th=2 or for n=1 and th=30. A smaller n leads to more extensive but less intense damage that can be compensated by keeping a larger th. Similarly, the PDFs of convergence are more sensitive to th than n, with higher values of th resulting in more convergence. The best correspondences between models and observations are with no damage and a reduced ellipse ratio (e=0.7) or with low damage (n=5) with a low healing timescale (th=2). Interestingly, higher values of P* with some damage have little to no impact on the convergence PDF, contrary to lowering the ellipse ratio and to results from Bouchat and Tremblay (2017). Nevertheless, any damage configuration is better than the control run at reproducing high-convergence events. In contrast, the PDFs of divergence are equally sensitive to n and th with more damage (lower n or higher th) resulting in a higher count of large deformations in divergence. In this case, both configurations (VP(0.7) and VPd()) with a lower ellipse ratio (e=0.7) overestimate divergence (Fig. 3; yellow curves). Moreover, a higher P* leads to higher divergence, in better agreement with observations (Fig. 3; deep-rose curves), with PDFs comparable to the fully damaged (n=1) and lower-ellipse-ratio (e=0.7) configurations.
We note that damage increases convergence and to a lesser extent divergence. This asymmetry between changes in positive and negative divergence, when damage is increased, precludes a perfect fit with observations with the default ellipse aspect ratio. The fact that reducing e from e=2 to e=0.7 or increasing P* both increase divergence while keeping convergence the same suggests that a combination of some damage (, and th=2) together with a higher P* or reduced ellipse aspect ratio will lead to the best fit in the three types of PDFs. See the section below on the sensitivity of the parameters for a nuanced discussion of their optimal values.

Figure 3(a, b, c) Simulated (color) and observed (black) probability density functions for shear strain rate, convergence, and divergence at a 10 km resolution and 3 d average (L=10 km and T=3 d) for January 2002. The power-law exponents calculated over 1 order of magnitude from the end of the distributions for each model and RGPS are shown in the inserts. (d, e, f) Binwise difference between the logarithms of models and RGPS PDFs. The average absolute difference per bin is shown in the inserts.
5.3 Complementary cumulative density functions (CCDFs)
The complementary cumulative density functions (CCDFs) of the two models differ substantially because of the higher count of large deformations of the VPd model bringing its CCDFs further from that of the control run (Fig. 4). For shear strain rate, the KS distances computed from the CCDFs of the different configurations of the VPd model are all slightly higher () than that of the control run (0.19). The fact that the latter crosses the CCDF of the data while keeping a similar maximal vertical range as the CCDFs of the VPd model results in this slightly lower KS distance, something that is not apparent from the PDFs alone. In contrast, the KS distances of the VPd CCDFs for convergence are similar to or smaller () than that of the control run (0.37). Not surprisingly, the configurations with th=2 have a very low KS distance (0.07 and 0.10), in line with the PDF of convergence that showed that high values of th result in overshooting. Yet again, the key improvement resides in the divergence rate with KS distances for the VPd model configurations that are smaller () than that of the control run (0.53), highlighting the success of the VPd model in simulating a higher count of large deformations in divergence. Again, VPd configurations with th=2 d have the largest KS distance in divergence with values closer to the control run (0.36 and 0.43). Interestingly, the best fit with observations comes from the standard VP model with a reduced ellipse aspect ratio (e=0.7) with very small KS distances (0.03, 0.03, 0.15, respectively). These low values may be due to the interannual variability in the RGPS data; the KS distances of a particular RGPS year can vary by as much as 0.17 when compared with the RGPS mean (Bouchat et al., 2022). Nonetheless, combining damage (n=5; th=30) with an increased P* does lead to very small KS distances (respectively, 0.21, 0.20, and 0.20) and supports the conclusions drawn from the PDFs alone. Unsurprisingly, the KS distance decreases with increasing n and decreasing th for shear strain rate and convergence, while for divergence, the KS distance decreases with decreasing n and increasing th – as for the PDFs. Overall, improvements in the divergence CCDF (from an increase in th or P* or a reduction in n) come at the cost of a deterioration in the convergence CCDFs.

Figure 4Simulated (color) and observed (black) cumulative density functions for shear strain rate, convergence, and divergence for models at a 10 km resolution (L=10 km, and T=3 d) for January 2002. The Kolmogorov–Smirnov distance between each model and the CCDFs of RGPS observations is shown in the inserts.
5.4 Spatiotemporal scaling
Both the VPd and VP models are able to reproduce some level of spatial and temporal scaling, as in the RGPS data (Figs. 5–6). The spatial scaling exponent β at T=3 d of the VPd model is highly sensitive to the exponent n and the healing timescale, th; it increases with decreasing n and increasing th (i.e., with more damage). The spatial scaling exponents range from β=0.06 to β=0.14 for the different configurations of the VPd model, with the slope of the spatial scaling curve for the fully damaged VPd() model being the highest (0.14) and closest to that of RGPS (0.15), while the standard VP model has an exponent 3 times smaller (β=0.05); all configurations of the VPd model have better spatial scaling than the VP model. Note how reducing the ellipse ratio (e=0.7, as proposed by Bouchat and Tremblay, 2017) also increases the spatial scaling exponent for the VPd model (Fig. 5). The increase in the scaling factor for the VPd model indicates that LKFs are more localized in space than those of the VP model.
On the other hand, the temporal scaling exponent α at L=10 km of the VPd model for all configurations is lower (α=0.13 to α=0.19) than that of the observations (0.28) or the VP model (0.23). Note that the combination of damage and a reduced ellipse aspect ratio (e=0.7) decreases the temporal scaling exponent (Fig. 6), contrary to its effect on the spatial scaling exponent.
All VPd simulation curves have a higher mean deformation rate (for both the spatial and temporal scaling), since damage increases the mean velocity of the ice (result not shown). Increasing P* reduces the mean ice velocity and the mean deformation rates across all scales to the same level as the control run (Figs. 5 and 6). This shift towards higher mean deformations is visible from the pan-Arctic simulations but has no impact on the spatial and temporal scaling.
In summary, the VPd model improves spatial localization at the expense of a weaker temporal localization of deformations. Temporal localization (or scaling) is not to be confused with intermittency. Temporal localization originates from the autocorrelations of the deformation time series at a given location and the rate at which these correlations decrease when increasing the time lag between deformation rate values. In other words, a lower temporal scaling means that a high-deformation event is more likely to be followed by another high-deformation event in the “near future”, resulting in a smeared time localization in the mean at a given scale. On the other hand, intermittency (or heterogeneity) is reflected in the change of localization within the same data set; the intermittency can be quantified from the shape of the structure function (as discussed below in Sect. 5.5). With this in mind, it is expected that the VPd model would have a lower temporal scaling, as the damage increases the probability of future (for t<th) deformation at a given grid cell. For the same reason, decreasing th increases temporal scaling.
The proposed damage parametrization simulates plastic weakening along LKFs and increases the memory of the system – something that the sea ice concentration and thickness can only accomplish in high-resolution sea ice models when sea ice divergence is present and over longer (advective) timescales. It differs from the (elastic) damage definition introduced in earlier work (e.g., Girard et al., 2011; Rampal et al., 2016; Dansereau et al., 2016; Plante et al., 2020), where damage reduces the elasticity of the material and therefore increases deformation for a fixed stress state. In the case of plastic damage, it is the effective viscosities in shear and divergence that are reduced, leading to larger strain rates for the same stress states.

Figure 5Simulated (color) and observed (black) spatial scaling of mean total deformation rates for T=3 d in January 2002. Lines are least-squares power-law fits, and their slope gives the scaling exponent β (shown in the insert).

Figure 6Simulated (color) and observed (black) temporal scaling of mean total deformation rates for L=10 km in January 2002. Lines are least-squares power-law fits, and their slope gives the scaling exponent α (shown in the insert).
5.5 Multifractal analysis
When fractal structures have local variations in fractal dimension, they are said to be multifractals. In the case of sea ice deformation or strain rates, multifractality arises from the higher space and time localization of larger deformation rates compared with smaller deformations (Weiss and Dansereau, 2017; Rampal et al., 2019).
The spatial structure functions of all the VPd configurations are in better agreement with observations when compared with that of the control run (Fig. 7). The spatial multifractality parameter () of the VPd configurations increases when increasing th, but the dependence on n only appears for high values of th. Higher values of ν characterize a field dominated by singularities of higher values; for sea ice, this means that configurations of the VPd model with a small healing timescale reflect this poorer multifractal behavior because the sea ice heals faster. For short healing timescales (th≈2), the dependency of the multifractal parameter ν on n disappears, but for th=30, the dependency of ν on n becomes apparent; the spatial multifractality parameter ν reaches a local minimum (ν=1.61) for n=3, followed by a local maximum at n=5 (ν=1.96), and then plateaus at some intermediate value (ν=1.76) as damage decreases towards that of the control run (see insert of Fig. 7).
The VPd() configuration highlights a complex transient state in the multifractal behavior of the model when changing the parameter n from fully damaged ice (the VPd() configuration) with high multifractality (ν=1.94) but low heterogeneity (C1=0.04) to high multifractality (ν=1.96) and high heterogeneity (C1=0.14) corresponding to the VPd() configuration. Further decreasing damage (e.g., VPd()) leads to lower values of both multifractality and heterogeneity. The heterogeneity of the field (C1) of all VPd model configurations () is also in better agreement with observations (C1=0.17) than that of the control run (C1=0.03), although it is still lower than RGPS for the lower values of th and n, again suggesting that the VPd model is better at focusing LKFs spatially. This is also in agreement with the higher Hurst exponent of the control run (H=0.95), suggesting a spatially smoother field than the different configurations of the VPd model () and RGPS observations (H=0.87). This is, again, consistent with the results from the spatial scaling analysis. However, values of the Hurst exponent at q=1 do not necessarily translate into having observation-fitting values of the other two multifractal parameters, which leads to graphs that are far from that of RGPS observations. Notably, the VPd() has a similar value of the Hurst exponent (H=0.86) compared with RGPS observations (H=0.87) but has the lowest heterogeneity (C1=0.04) of all the VPd model configurations, resulting in one of the poorest representations of the observations together with the th=2 configurations.
The most striking differences between the control run and the VPd model are their heterogeneity and spatial autocorrelations. Combining the damage parametrization with a different value of the ellipse ratio (e=0.7) further increases the heterogeneity (C1=0.21) of the deformation field at the cost of lowering the spatial multifractality (ν=1.57). Increasing P* also leads to higher heterogeneity (C1=0.16), while still maintaining the high values of the multifractality (ν=1.95). Interestingly, a third root appears in the q<1 range when we change the ellipse aspect ratio or P* (see Fig. 7). The multifractal theory does not allow for more than two roots, and the fact that this is observed is indicative that the model (the VPd at least) might not follow the multifractal theory. This might also be the case for the other configurations, the observations, and the control run. Whether this is new behavior associated with the damage parametrization in tandem with the change in the ellipse aspect ratio and P* or an enhancement of an already existing property remains to be investigated.
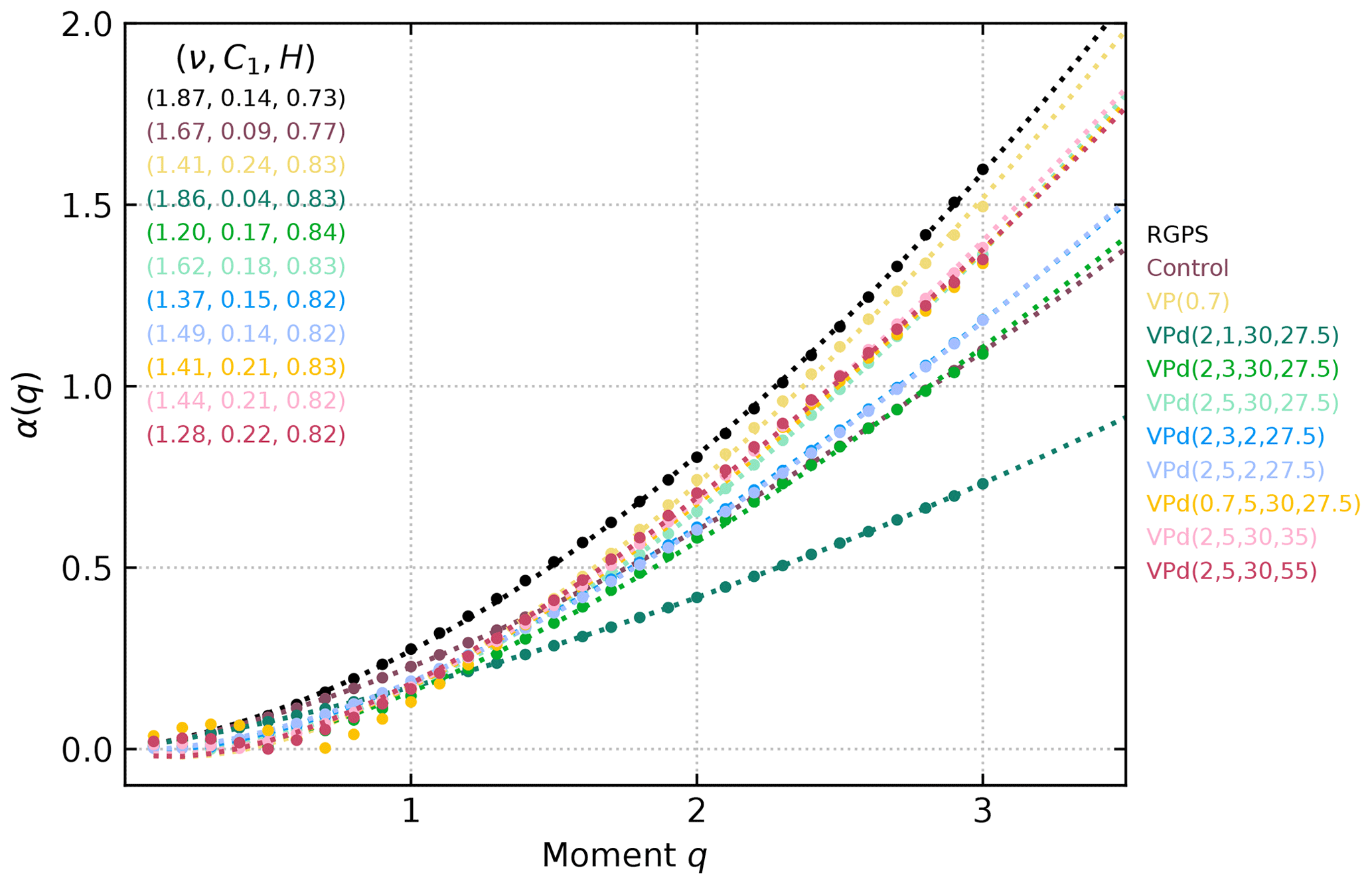
The differences in the temporal structure functions of the VPd model and the control run are more subtle (see Fig. 8). Temporal multifractality is also reproduced by the different configurations of the VPd model (), and they are all somewhat worse than the standard VP model (ν=1.67) compared with RGPS data (ν=1.87). Similarly to the spatial structure functions, almost all configurations of the VPd model are as temporally heterogeneous () as the observations (C1=0.14), while the control run is the least heterogeneous (C1=0.09), except for the fully damaged VPd() configuration. RGPS observations have a somewhat low Hurst exponent value (H=0.73), while all configurations of the VPd model have a high value () even compared with the control run (H=0.77). This high Hurst exponent brings down the graph of the VPd temporal structure functions even if their curvature (governed by ν and C1) is always higher than that of the control run structure function and in agreement with the curvature of the graph of the structure function computed from RGPS observations, especially for high values of n and th. This curvature change accounts for the majority of the difference between the simulated temporal structure functions, and a high Hurst exponent is indicative of a temporally smoother field – in agreement with the results of the temporal scaling analysis. The only configuration that has a lower curvature than the control run is the fully damaged VPd(). This configuration has both low heterogeneity and the high Hurst exponent, leading to a temporal structure function that does not have enough curvature. Overall, reducing n (more damage) reduces the temporal multifractality, and reducing th reduces the heterogeneity. Moreover, increasing P* or reducing the ellipse ratio increases heterogeneity but reduces multifractality. Interestingly, the Hurst exponent is almost constant for all configurations of the VPd and the standard VP with a reduced ellipse aspect ratio. As in the spatial structure function, changing the shape or size of the ellipse does unveil a third root in the temporal structure function in the q<1 range, which is indicative of the fact that the VPd model does not follow the multifractal theory.

Figure 7Simulated (color) and observed (black) spatial structure functions β(q) of the total deformation rates for T=3 d for January 2002. Dotted lines are the least-squares fit for Eq. (27), and the inserts are the value of the parameters of the fit (ν, C1, H).
5.6 Sensitivity to th, n, and e
In the VPd model, a shorter healing timescale results in an overall smoother deformation field with fewer intense LKFs (see Fig. 2e–h). Therefore, a shorter healing timescale in this model is not necessarily wanted, as it reduces the effects of the damage source term (see Eq. 16). As a result, the spatial scaling improves marginally, but the temporal scaling becomes significantly worse (see the blue curves and their inserts in Figs. 5 and 6). This is also apparent in the multifractality as there are only small discrepancies between the VPd model with a short healing timescale and the control run (see Figs. 7–8). The optimal healing timescale value , therefore, should be on the order of 1 month rather than days in a VPd model, in contrast with the value commonly used in the MEB model of 1 d and that derived from observations (Dansereau et al., 2016; Murdza et al., 2022). This is of course expected since damage in the VPd model does not represent necessarily the same thing as damage in the MEB model. Moreover, in Murdza et al. (2022), the authors raised the question of whether the rapid strength recovery of the ice that they measured can be applied to larger scales.
In the VPd model, deformation rates are sensitive to the exponent parameter n. When n is low, the damage reaches 1 in a few time steps and remains high, meaning that all the ice is nearly fully damaged (see Fig. 2d), except for grid cells in the viscous regime. When n is large (>50), the VPd model gives morally the same results as the VP model. Considering all the deformation metrics above, we suggest the value of for the damage parameter n.
When combining these values with the reduced value of the ellipse ratio (e=0.7; Bouchat and Tremblay, 2017), we find that the spatial scaling is stronger, while temporal scaling is even lower. This is in disagreement with Bouchat and Tremblay (2017), who found that changing e increases both spatial and temporal scaling. This is presumably due to the fact that reducing e strengthens the ice in shear and thus enhances the impact of the damage parametrization. Moreover, increasing P* does result in better multifractality and magnitude of deformation rates, without any consequences for the scaling. We suggest increasing P* when implementing the VPd model.
Deformation rate statistics simulated by the VPd model are in better agreement with RGPS observations than those of the standard VP model. Unsurprisingly, the plastic rheology with damage is particularly good at reproducing the spatial scaling and structure function. Moreover, while a lower temporal scaling was achieved with the damage parametrization, the temporal intermittency of the VPd model was slightly higher and closer to the observations. This shows that the inclusion of a damage parametrization inside a model has a non-negligible impact on the scaling, multifractality, and heterogeneity of the deformation fields both spatially and temporally.
Considering that the VP model can still produce some low level of multifractality, we hypothesize that the governing factor in reproducing deformation rate statistics is not necessarily the physics behind the parametrizations nor the pre-fracture elastic regime but rather the “amount of memory” of past deformations present in a model. Memory in the VP model is present through the concentration and thickness of the ice; in the VPd model (or EB family), memory is also associated with damage which is present for both convergent and divergent flows and has a much faster timescale (td=1 d) than h and A. Another possibility could simply be the addition of some form of spatiotemporal heterogeneity in the ice strength, which the damage parametrization presented in this study is for – highlighting that even ad hoc parametrizations are going to improve deformation rate statistics.
Since damage is expressed in terms of the bulk viscosity term, the memory of the system resides in the ice strength through the damage coupling factor (see Eq. 18). The plastic deformations therefore instantaneously reduce the ice strength locally. This new memory in the system complements the memory associated with sea ice divergence via the concentration and thickness of the ice. That is, the ice is more susceptible to break where – or near where – it has been previously broken. LKFs are, therefore, a memory network of the viscous–plastic model that includes a damage parametrization with a learning curve that depends on the specific choice of the damage timescale and exponent, with a slow regenerative healing mechanism that acts as a memory eraser. This behavior is reflected in higher temporal intermittency and a higher spatial multifractality, heterogeneity, and scaling in the VPd model. The downside is that the temporal multifractality and scaling exponents in the VPd model are lower, which indicates that long-time autocorrelations are especially strong in the VPd model. This is explained by the memory of previously damaged ice, which prompts the ice to break where it already broke in the past.
Usually, when critical stress is reached in an MEB model, Young's modulus is instantaneously reduced locally, and the excess stress results in brittle fracture and increased damage. On the other hand, in a standard viscous–plastic model, when plasticity is reached, the ice strength is reduced only for large (grid-scale) diverging ice events. In this scenario, the ice thickness and concentration are reduced, leading to a lower ice strength at the next time step. This process is slow and much smoother than the one in the VPd model, which mimics the behavior of the MEB model. In that regard, the VPd model permits new types of weakening that reduce the ice strength (i.e., shear and convergence), something that is not possible in a standard VP model, hence creating more well-defined LKFs that lead to a better statistical fit of the observations. This is reflected in the higher counts of high-deformation events in both convergence and divergence.
In the VPd model with a modified smaller ellipse aspect ratio, a third root appeared in both the spatial and temporal multifractality plots. This means that the theory, which is only valid for a Lévy index between 0 and 2, does not hold anymore. Is this particular configuration of the VPd model uncovering a new property, or is it simply amplifying something that was already there and was overlooked? What does it mean for the multifractality of LKFs?
In light of the results presented above, we recommend the implementation of this damage parametrization in a standard viscous–plastic model. This parametrization comes at no additional cost, contrary to increasing the spatial resolution of the model, which increases the computational time of simulations by a factor of ∼ 25 for a 5-fold-increased spatial grid resolution of 2 km × 2 km, or even the tuning of the ellipse ratio, which decreases the numerical convergence substantially. The damage parametrization, together with a careful choice of yield curve parameters (see, for example, Bouchat and Tremblay, 2017, and Bouchat et al., 2022), would prove to be a low-cost, efficient way of improving deformation statistics, even if sea ice models are not run at a very high resolution. The VP sea ice rheology is one rheology among many others that simulates many climate-relevant sea ice properties satisfactorily (drift and deformation statistics) despite all of its flaws (yield curve, flow rule, and elasticity simulated as viscous creep).
As the MEB model includes a damage parametrization, we ask the question whether the agreement between the MEB model and the RGPS observations is in part due to this sub-grid fracturing parametrization in conjunction with the Lagrangian mesh used in MEB models rather than the explicit choice of rheology – elastic deformations followed by brittle fracture. Recent studies (together with results presented here) suggest that the inclusion of a damage parameter (Plante et al., 2020) and the Lagrangian mesh (Bouchat et al., 2022) are key factors in a better description of deformation rate statistics. RGPS observations are obtained from the displacement of tracers at a 10 km spatial scale, but ice motion is much more complex, and these observations of emergent properties include the effects of processes that take place at much finer scales (sub-kilometer) such as bending, twisting, micro-fractures, and fusion. We hypothesize that efforts put into developing sub-grid parametrizations will be the go-to for fast and light deformation rate statistics improvement in the short term. Notably, using discrete element models (DEMs) as toy models for developing and calibrating new sub-grid-scale parametrizations may provide exciting results.
Note that we used the same methodology as in Bouchat and Tremblay (2017). This is important to keep in mind as their results show that maximum likelihood estimators (MLEs) of the scaling parameters for the tail of PDFs of RGPS gridded deformation products are 29 % (convergence), 25 % (divergence), and 14 % (shear) higher than those obtained using the RGPS Lagrangian product (Marsan et al., 2004; Girard et al., 2009). They attributed about 10 % of the higher scaling parameters to the choice of mask and the rest to the smoothing inherent to the gridding procedure. Therefore, our results do not necessarily reflect reality but are nevertheless still useful as they help discriminate our model's configurations with RGPS gridded observations for a particular year. The results presented are robust to the exact choice of year. However, the mask we are using is located above the Canada Basin and extends to the East Siberian Sea, and we are only using the data from January 2002. Exact numbers are therefore probably influenced by local – in space and time – effects. As a matter of fact, when doing the same analysis for other years, the values of the parameters of the multifractal analysis and the PDF decay exponents vary, but conclusions drawn from this study are robust, as the general behavior of the models stays the same for different years (results not shown). It is believed that specific numbers given here are not necessarily representative of reality but are rather just a rough estimate of the behavior of the models and RGPS observations.
We implement a sub-grid damage parametrization in the standard viscous–plastic model to investigate the effects of damage on the deformation rate statistics – namely, the probability density function (PDF) exponential decay and shape, the Kolmogorov–Smirnov distance between cumulative density functions (CDFs) of simulations and observations, the spatiotemporal scaling exponents, and the multifractal parameters expressing the spatiotemporal structure functions. Results show that the deformation rate statistics are very sensitive to the inclusion of a damage parametrization, including advection of damage and a healing mechanism. Therefore, we argue that sub-grid-scale parametrizations should be considered when comparing different rheological models. Specifically, we find that this new damage parametrization improves power-law scaling and multifractality of deformations in space in the viscous–plastic model, the trade-off being a lower exponent than the standard VP model for the temporal power-law scaling. We show that the new VPd model increases the number of large divergence and convergence rates in better agreement with RGPS observations as per the new quantitative metric introduced by Bouchat et al. (2022). Moreover, we show that the VPd model is especially good at producing spatial multifractality, which was expected since the damage parameter was constructed to improve the spatial localization of LKFs. The fact that the standard VP model can still produce some spatial multifractality, without including any cascade-like mechanisms that would permit multifractality as in the VPd model, indicates that other physical mechanisms are at play in both models. These other mechanisms are not identified, and the origin of multifractality in the VP model remains an open question. We hypothesize that one likely candidate is the amount of memory that a model possesses. The proposed damage parametrization is a compelling low-cost add-on to viscous–plastic models.
The implementation of the proposed damage parametrization inside viscous–plastic models provides an efficient, low-cost option for improving deformation rate statistics in low-resolution sea ice models in tandem with a relatively long healing timescale and an increased P*. Other possibilities would be to couple the damage parameter with the ellipse ratio directly rather than the ice strength, which would change the physics of the ice locally rather than changing its strength. Future work will include other sub-grid-scale parametrizations such as the inclusion of memory through an evolution equation for dilation along linear kinematic features – where memory seems to be a determining factor for deformation statistics – and non-normal flow rules – i.e., rheologies that allow for plastic deformations and for time-varying internal angles of friction. These would allow models to have better memory of past deformations.
All analysis codes are available on GitHub at https://github.com/antoinesavard/SIM-plots.git (last access: 23 April 2024). All published code and data products can be found on Zenodo. This includes the published analysis code (https://doi.org/10.5281/zenodo.10798930, Savard, 2024a), the ice velocities from model output (https://doi.org/10.5281/zenodo.10830260, Savard, 2024b), and RGPS gridded velocity derivatives (https://doi.org/10.5067/GWQU7WKQZBO4, Kwok, 1997).
AS and BT designed the experiments, and AS carried them out; AS developed the model parametrization and statistical analysis code and performed the simulations; AS analyzed the models' outputs; AS wrote the manuscript draft with contributions and reviews from BT; AS archived the code and the models' outputs.
The contact author has declared that neither of the authors has any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
Antoine Savard is grateful for the scientific and financial support by Fonds de Recherche du Québec – Nature et technologie (FRQNT), Arctrain Canada, McGill University, the Wolfe Chair in Scientific and Technological Literacy (Wolfe Fellowship), and Québec-Océan. Bruno Tremblay is grateful for the financial support by the Natural Sciences and Engineering and Research Council (NSERC) Discovery Program and by Environment and Climate Change Canada (ECCC) via the Grants and Contributions program. The authors wish to thank Amélie Bouchat for providing access to the RGPS observations product. The authors also thank Daniel Feltham, Jérôme Weiss, and one anonymous referee for their constructive comments that helped improve the quality of the paper.
This research has been partially supported by the Natural Sciences and Engineering and Research Council (NSERC) Discovery Program and by Environment and Climate Change Canada (ECCC) via the Grants and Contributions program awarded to Bruno Tremblay. This project also received contributions from the Fonds de recherche du Québec – Nature et technologie (grant no. 303750) awarded to Antoine Savard.
This paper was edited by Daniel Feltham and reviewed by Jérôme Weiss and one anonymous referee.
Aagaard, K., Coachman, L., and Carmack, E.: On the halocline of the Arctic Ocean, Deep-Sea Res. Pt. A, 28, 529–545, https://doi.org/10.1016/0198-0149(81)90115-1, 1981. a
Akima, H.: Algorithm 760: rectangular-grid-data surface fitting that has the accuracy of a bicubic polynomial, ACM T. Math. Softw., 22, 357–361, 1996. a
Amitrano, D. and Helmstetter, A.: Brittle creep, damage, and time to failure in rocks, J. Geophys. Res.-Sol. Ea., 111, B11201, https://doi.org/10.1029/2005JB004252, 2006. a
Amitrano, D., Grasso, J.-R., and Hantz, D.: From diffuse to localised damage through elastic interaction, Geophys. Res. Lett., 26, 2109–2112, 1999. a
Bouchat, A. and Tremblay, B.: Using sea-ice deformation fields to constrain the mechanical strength parameters of geophysical sea ice, J. Geophys. Res.-Oceans, 122, 5802–5825, https://doi.org/10.1002/2017JC013020, 2017. a, b, c, d, e, f, g, h, i, j, k, l, m, n
Bouchat, A. and Tremblay, B.: Reassessing the quality of sea-ice deformation estimates derived from the RADARSAT Geophysical Processor System and its impact on the spatiotemporal scaling statistics, J. Geophys. Res.-Oceans, 125, e2019JC015944, https://doi.org/10.1029/2019JC015944, 2020. a
Bouchat, A., Hutter, N., Chanut, J., Dupont, F., Dukhovskoy, D., Garric, G., Lee, Y. J., Lemieux, J.-F., Lique, C., Losch, M., Maslowski, W., Myers, P. G., Ólason, E., Rampal, P., Rasmussen, T., Talandier, C., Tremblay, B., and Wang, W: Sea Ice Rheology Experiment (SIREx): 1. Scaling and Statistical Properties of Sea-Ice Deformation Fields, J. Geophys. Res.-Oceans, 127, e2021JC017667, https://doi.org/10.1029/2021JC017667, 2022. a, b, c, d, e, f, g, h, i, j, k, l, m
Bouillon, S. and Rampal, P.: Presentation of the dynamical core of neXtSIM, a new sea ice model, Ocean Model., 91, 23–37, 2015. a
Bouillon, S., Fichefet, T., Legat, V., and Madec, G.: The elastic–viscous–plastic method revisited, Ocean Model., 71, 2–12, 2013. a
Brown, R. A.: Planetary boundary layer modeling for AIDJEX, in: Proc. ICSI/AIDJEX Symp. on Sea Ice Processes and Models, University of Washington, 1979. a
Clauset, A., Shalizi, C. R., and Newman, M. E.: Power-law distributions in empirical data, SIAM Rev., 51, 661–703, 2009. a
Coon, M., Maykut, G., and Pritchard, R.: Modeling the pack ice as an elastic-plastic material, AIDJEX Bulletin, 24, p. 1, 1974. a, b
Coon, M., Kwok, R., Levy, G., Pruis, M., Schreyer, H., and Sulsky, D.: Arctic Ice Dynamics Joint Experiment (AIDJEX) assumptions revisited and found inadequate, J. Geophys. Res.-Oceans, 112, C11S90, https://doi.org/10.1029/2005JC003393, 2007. a, b
Cowie, P. A., Vanneste, C., and Sornette, D.: Statistical physics model for the spatiotemporal evolution of faults, J. Geophys. Res.-Sol. Ea., 98, 21809–21821, https://doi.org/10.1029/93JB02223, 1993. a
Dansereau, V., Weiss, J., Saramito, P., and Lattes, P.: A Maxwell elasto-brittle rheology for sea ice modelling, The Cryosphere, 10, 1339–1359, https://doi.org/10.5194/tc-10-1339-2016, 2016. a, b, c, d, e, f, g, h, i, j, k, l
Flato, G. M. and Hibler, W. D.: Modeling pack ice as a cavitating fluid, J. Phys. Oceanogr., 22, 626–651, 1992. a
Friedlein, J., Mergheim, J., and Steinmann, P.: Efficient gradient enhancements for plasticity with ductile damage in the logarithmic strain space, Eur. J. Mech., 99, 104946, https://doi.org/10.1016/j.euromechsol.2023.104946, 2023. a
Girard, L., Weiss, J., Molines, J.-M., Barnier, B., and Bouillon, S.: Evaluation of high-resolution sea ice models on the basis of statistical and scaling properties of Arctic sea ice drift and deformation, J. Geophys. Res.-Oceans, 114, C08015, https://doi.org/10.1029/2008JC005182, 2009. a, b
Girard, L., Bouillon, S., Weiss, J., Amitrano, D., Fichefet, T., and Legat, V.: A new modeling framework for sea-ice mechanics based on elasto-brittle rheology, Ann. Glaciol., 52, 123–132, https://doi.org/10.3189/172756411795931499, 2011. a, b, c, d
Hafezolghorani, M., Hejazi, F., Vaghei, R., Jaafar, M. S. B., and Karimzade, K.: Simplified Damage Plasticity Model for Concrete, Struct. Eng. Int., 27, 68–78, https://doi.org/10.2749/101686616X1081, 2017. a
Hibler, W. D.: A viscous sea ice law as a stochastic average of plasticity, J. Geophys. Res., 82, 3932–3938, https://doi.org/10.1029/JC082i027p03932, 1977. a
Hibler, W. D.: A Dynamic Thermodynamic Sea Ice Model, J. Phys. Oceanogr., 9, 815–846, https://doi.org/10.1175/1520-0485(1979)009<0815:ADTSIM>2.0.CO;2, 1979. a, b, c, d, e, f
Hoek, E.: Brittle fracture of rock, Rock mechanics in engineering practice, J. Wiley, London, 130, 9–124, 1968. a
Hoffman, J. P., Ackerman, S. A., Liu, Y., and Key, J. R.: The detection and characterization of Arctic Sea ice leads with satellite imagers, Remote Sens., 11, 521, https://doi.org/10.3390/rs11050521, 2019. a
Hunke, E. C.: Viscous–plastic sea ice dynamics with the EVP model: Linearization issues, J. Comput. Phys., 170, 18–38, 2001. a
Hunke, E. C. and Dukowicz, J. K.: An elastic–viscous–plastic model for sea ice dynamics, J. Phys. Oceanogr., 27, 1849–1867, 1997. a
Hutter, N., Losch, M., and Menemenlis, D.: Scaling properties of arctic sea ice deformation in a high-resolution viscous-plastic sea ice model and in satellite observations, J. Geophys. Res.-Oceans, 123, 672–687, 2018. a
Hutter, N., Bouchat, A., Dupont, F., Dukhovskoy, D. S., Koldunov, N. V., Lee, Y. J., Lemieux, J.-F., Lique, C., Losch, M., Maslowski, W., Myers, P. G., Ólason, E., Rampal, P., Rasmussen, T., Talandier, C., Tremblay, B., and Wang, Q.: Sea Ice Rheology Experiment (SIREx): 2. Evaluating linear kinematic features in high-resolution sea ice simulations, J. Geophys. Res.-Oceans, 127, e2021JC017666, https://doi.org/10.1029/2021JC017666, 2022. a
Isaksson, P. and Ståhle, P.: Mode II crack paths under compression in brittle solids–a theory and experimental comparison, Int. J. Solids Struct., 39, 2281–2297, 2002a. a
Isaksson, P. and Ståhle, P.: Prediction of shear crack growth direction under compressive loading and plane strain conditions, Int. J. Fract., 113, 175–194, 2002b. a
Jason, L., Huerta, A., Pijaudier-Cabot, G., and Ghavamian, S.: An elastic plastic damage formulation for concrete: Application to elementary tests and comparison with an isotropic damage model, Comput. Method. Appl. M., 195, 7077–7092, https://doi.org/10.1016/j.cma.2005.04.017, 2006. a
Kalnay, E., Kanamitsu, M., Kistler, R., Collins, W., Deaven, D., Gandin, L., Iredell, M., Saha, S., White, G., Woollen, J., Zhu, Y., Chelliah, M., Ebisuzaki, W., Higgins, W., Janowiak, J., Mo, K. C., Ropelewski, C., Wang, J., Leetmaa, A., Reynolds, R., Jenne, R., and Joseph, D.: The NCEP/NCAR 40-year reanalysis project, B. Am. Meteorol. Soc., 77, 437–472, 1996. a
Kreyscher, M., Harder, M., and Lemke, P.: First results of the Sea-Ice Model Intercomparison Project (SIMIP), Ann. Glaciol., 25, 8–11, 1997. a
Kreyscher, M., Harder, M., Lemke, P., and Flato, G. M.: Results of the Sea Ice Model Intercomparison Project: Evaluation of sea ice rheology schemes for use in climate simulations, J. Geophys. Res.-Oceans, 105, 11299–11320, 2000. a
Krupnik, I.: SIKU: knowing our ice: documenting Inuit sea ice knowledge and use, edited by: Krupnik, I., Aporta, C., Gearheard, S., Laidler, G. J., and Holm, K. L., Springer Dordrecht, 501 pp., https://doi.org/10.1007/978-90-481-8587-0, 2010. a
Kwok, R.: RADARSAT-1 data 1997–2008 (CSA), Dataset: Three-day Gridded Sea-Ice Kinematics Data Retrieved from ASF DAAC [data set], https://doi.org/10.5067/GWQU7WKQZBO4, 1997. a, b
Kwok, R.: Deformation of the Arctic Ocean Sea Ice Cover between November 1996 and April 1997: A Qualitative Survey, in: IUTAM Symposium on Scaling Laws in Ice Mechanics and Ice Dynamics, edited by: Dempsey, J. P. and Shen, H. H., Springer Netherlands, Dordrecht, 315–322, ISBN 978-94-015-9735-7, 2001. a
Kwok, R., Schweiger, A., Rothrock, D. A., Pang, S., and Kottmeier, C.: Sea ice motion from satellite passive microwave imagery assessed with ERS SAR and buoy motions, J. Geophys. Res.-Oceans, 103, 8191–8214, https://doi.org/10.1029/97JC03334, 1998. a, b
Lemieux, J.-F. and Tremblay, B.: Numerical convergence of viscous-plastic sea ice models, J. Geophys. Res.-Oceans, 114, C05009, https://doi.org/10.1029/2008JC005017, 2009. a, b
Lemieux, J.-F., Tremblay, B., Thomas, S., Sedláček, J., and Mysak, L. A.: Using the preconditioned Generalized Minimum RESidual (GMRES) method to solve the sea-ice momentum equation, J. Geophys. Res.-Oceans, 113, C10004, https://doi.org/10.1029/2007JC004680, 2008. a, b, c
Lemieux, J.-F., Tremblay, B., Sedláček, J., Tupper, P., Thomas, S., Huard, D., and Auclair, J.-P.: Improving the numerical convergence of viscous-plastic sea ice models with the Jacobian-free Newton–Krylov method, J. Comput. Phys., 229, 2840–2852, https://doi.org/10.1016/j.jcp.2009.12.011, 2010. a, b, c, d
Lindsay, R. and Stern, H.: The RADARSAT geophysical processor system: Quality of sea ice trajectory and deformation estimates, J. Atmos. Ocean. Tech., 20, 1333–1347, 2003. a
Lovejoy, S. and Schertzer, D.: Scaling and multifractal fields in the solid earth and topography, Nonlin. Processes Geophys., 14, 465–502, https://doi.org/10.5194/npg-14-465-2007, 2007. a, b
Lubliner, J., Oliver, J., Oller, S., and Oñate, E.: A plastic-damage model for concrete, Int. J. Solids Struct., 25, 299–326, https://doi.org/10.1016/0020-7683(89)90050-4, 1989. a
Luccioni, B., Oller, S., and Danesi, R.: Coupled plastic-damaged model, Comput. Method. Appl. M., 129, 81–89, https://doi.org/10.1016/0045-7825(95)00887-X, 1996. a
Marsan, D. and Weiss, J.: Space/time coupling in brittle deformation at geophysical scales, Earth Planet. Sc. Lett., 296, 353–359, https://doi.org/10.1016/j.epsl.2010.05.019, 2010. a, b
Marsan, D., Stern, H., Lindsay, R., and Weiss, J.: Scale dependence and localization of the deformation of Arctic sea ice, Phys. Rev. Lett., 93, 178501, https://doi.org/10.1103/PhysRevLett.93.178501, 2004. a, b, c, d, e, f
McPhee, M. G.: Ice-ocean momentum transfer for the aidjex ice model, AIDJEX Bull., 29, 93–111, 1975. a
McPhee, M. G.: The Upper Ocean, Springer US, Boston, MA, 339–394, ISBN 978-1-4899-5352-0, https://doi.org/10.1007/978-1-4899-5352-0_5, 1986. a
McPhee, M. G., Kwok, R., Robins, R., and Coon, M.: Upwelling of Arctic pycnocline associated with shear motion of sea ice, Geophys. Res. Lett., 32, L10616, https://doi.org/10.1029/2004GL021819, 2005. a
Murdza, A., Schulson, E., and Renshaw, C.: Relaxation of flexure-induced strengthening of ice, Geophys. Res. Lett., 49, e2021GL096559, https://doi.org/10.1029/2021GL096559, 2022. a, b, c
Olason, E., Boutin, G., Korosov, A., Rampal, P., Williams, T., Kimmritz, M., Dansereau, V., and Samaké, A.: A New Brittle Rheology and Numerical Framework for Large-Scale Sea-Ice Models, J. Adv. Model. Earth Sy., 14, e2021MS002685, https://doi.org/10.1029/2021MS002685, 2022. a, b, c
Parisio, F. and Laloui, L.: Plastic-damage modeling of saturated quasi-brittle shales, Int. J. Rock Mech. Min., 93, 295–306, https://doi.org/10.1016/j.ijrmms.2017.01.016, 2017. a
Plante, M.: A generalized damage parameterization within the Maxwell Elasto-Brittle rheology: applications to ice fractures and ice arches in landfast ice simulations, Thesis, https://escholarship.mcgill.ca/concern/theses/gf06g703w (last access: 24 April 2024), 2021. a, b
Plante, M., Tremblay, B., Losch, M., and Lemieux, J.-F.: Landfast sea ice material properties derived from ice bridge simulations using the Maxwell elasto-brittle rheology, The Cryosphere, 14, 2137–2157, https://doi.org/10.5194/tc-14-2137-2020, 2020. a, b, c, d, e, f
Proshutinsky, A. and Johnson, M.: Arctic Ocean Oscillation Index (AOO): interannual and decadal changes of the Arctic climate, in: Geophys. Research Abstracts, Vienna, Austria, 3–8 April 2011, EGU2011-7850 13, 2011. a
Rampal, P., Weiss, J., Marsan, D., Lindsay, R., and Stern, H.: Scaling properties of sea ice deformation from buoy dispersion analysis, J. Geophys. Res.-Oceans, 113, C03002, https://doi.org/10.1029/2007JC004143, 2008. a
Rampal, P., Bouillon, S., Ólason, E., and Morlighem, M.: neXtSIM: a new Lagrangian sea ice model, The Cryosphere, 10, 1055–1073, https://doi.org/10.5194/tc-10-1055-2016, 2016. a, b, c, d, e
Rampal, P., Dansereau, V., Olason, E., Bouillon, S., Williams, T., Korosov, A., and Samaké, A.: On the multi-fractal scaling properties of sea ice deformation, The Cryosphere, 13, 2457–2474, https://doi.org/10.5194/tc-13-2457-2019, 2019. a, b, c
Rigor, I. G., Wallace, J. M., and Colony, R. L.: Response of sea ice to the Arctic Oscillation, J. Climate, 15, 2648–2663, 2002. a
Savard, A.: McGill SIM plotting tools, Zenodo [code], https://doi.org/10.5281/zenodo.10798930, 2024a. a
Savard, A.: Plastic damage in sea ice – model outputs and observations, Zenodo [data set], https://doi.org/10.5281/zenodo.10830260, 2024b. a
Schmitt, F., Lovejoy, S., and Schertzer, D.: Multifractal analysis of the Greenland ice-core project climate data, Geophys. Res. Lett., 22, 1689–1692, 1995. a
Schreyer, H., Sulsky, D., Munday, L., Coon, M., and Kwok, R.: Elastic-decohesive constitutive model for sea ice, J. Geophys. Res.-Oceans, 111, C11S26, https://doi.org/10.1029/2005JC003334, 2006. a
Schulson, E. M.: Compressive shear faults within arctic sea ice: Fracture on scales large and small, J. Geophy. Res.-Oceans, 109, C07016, https://doi.org/10.1029/2003JC002108, 2004. a
Steele, M., Morley, R., and Ermold, W.: PHC: A global ocean hydrography with a high-quality Arctic Ocean, J. Climate, 14, 2079–2087, 2001. a
Sulsky, D. and Peterson, K.: Toward a new elastic–decohesive model of Arctic sea ice, Phys. D, 240, 1674–1683, 2011. a
Tang, C.: Numerical simulation of progressive rock failure and associated seismicity, Int. J. Rock Mech. Min., 34, 249–261, https://doi.org/10.1016/S0148-9062(96)00039-3, 1997. a
Thompson, D. W. and Wallace, J. M.: The Arctic Oscillation signature in the wintertime geopotential height and temperature fields, Geophys. Res. Lett., 25, 1297–1300, 1998. a
Tremblay, L.-B. and Mysak, L. A.: Modeling Sea Ice as a Granular Material, Including the Dilatancy Effect, J. Phys. Oceanogr., 27, 2342–2360, https://doi.org/10.1175/1520-0485(1997)027<2342:MSIAAG>2.0.CO;2, 1997. a, b
Tsamados, M., Feltham, D. L., and Wilchinsky, A.: Impact of a new anisotropic rheology on simulations of Arctic sea ice, J. Geophys. Res.-Oceans, 118, 91–107, 2013. a
Ungermann, M., Tremblay, L. B., Martin, T., and Losch, M.: Impact of the ice strength formulation on the performance of a sea ice thickness distribution model in the A rctic, J. Geophys. Res.-Oceans, 122, 2090–2107, 2017. a
Voyiadjis, G. Z., Taqieddin, Z. N., and Kattan, P. I.: Anisotropic damage–plasticity model for concrete, Int. J. Plasticity, 24, 1946–1965, https://doi.org/10.1016/j.ijplas.2008.04.002, 2008. a
Weiss, J.: Intermittency of principal stress directions within Arctic sea ice, Phys. Rev. E, 77, 056106, https://doi.org/10.1103/PhysRevE.77.056106, 2008. a
Weiss, J.: Drift, Deformation, and Fracture of Sea Ice: A Perspective Across Scales, SpringerBriefs in Earth Sciences, Springer Netherlands, Dordrecht, ISBN 978-94-007-6201-5 978-94-007-6202-2, https://doi.org/10.1007/978-94-007-6202-2, 2013. a
Weiss, J.: Exploring the “solid turbulence” of sea ice dynamics down to unprecedented small scales, J. Geophys. Res.-Oceans, 122, 6071–6075, 2017. a
Weiss, J. and Dansereau, V.: Linking scales in sea ice mechanics, Philos. T. Roy. Soc. A, 375, 20150352, https://doi.org/10.1098/rsta.2015.0352, 2017. a
Wilchinsky, A. V. and Feltham, D. L.: Modelling the rheology of sea ice as a collection of diamond-shaped floes, J. Non-Newtonian Fluid Mech., 138, 22–32, 2006. a
Zhang, J. and Hibler, W. D.: On an efficient numerical method for modeling sea ice dynamics, J. Geophys. Res.-Oceans, 102, 8691–8702, https://doi.org/10.1029/96JC03744, 1997. a